PROTOTYPING
Digital Model - Attuner and Depositor on the geomorphology table
Systems Diagram - Feedback Loop of the sensing and actuation machines (Attuner; and Section Cutter-an iteration of Depositor)
extracted real-time contoured surfaces
Contoured surface from a live-digital scan
scanned_surface By Leif Es Modelo »
ROBOTIC STUDY #1
Depositor conceptual and algorithmic logic
ROBOTIC STUDY #2
PROCESS
The following are images and videos showing the process of designing, building, and testing of the robotic device:
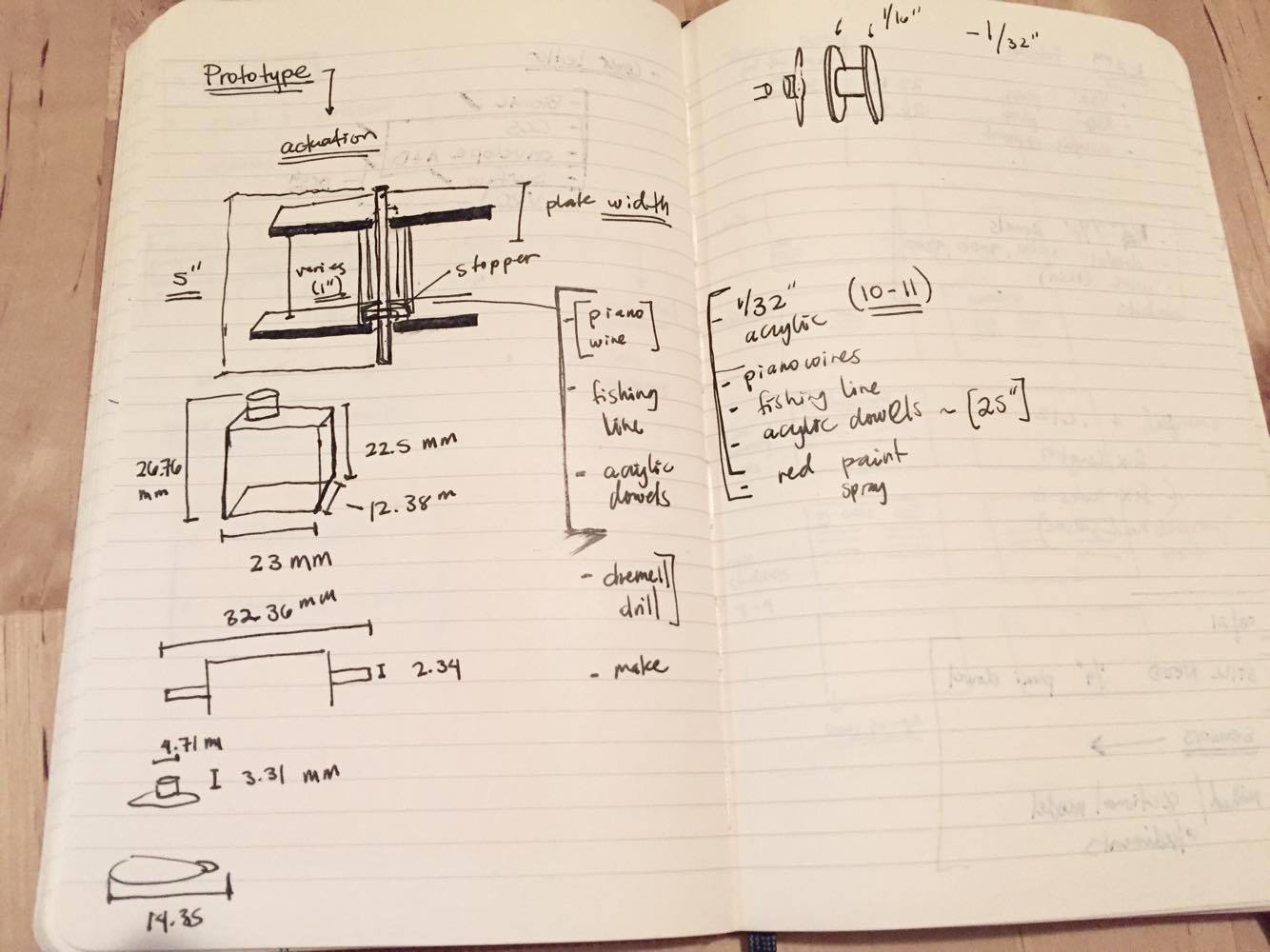
Sketch: Initial prototyping sketch
Attuner, rendered digital model

Early Stages: Building and assembling the rows of robotic piles

333: 3 power supplies: 5V @ 5 Amps, powering the 3 Arduino Uno Processing Boards with 3 Adafruit 16-Channel 12-bit PWM/Servo Shield - I2C interface
Below is the code used for the actuation of the live model, Attuner. It is a modified version provided by Adafruit. Original code written by Limor Fried/Ladyada for Adafruit Industries; altered and modified specifically for the project by Leif Estrada:
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
#define SERVOMIN 150 // this is the 'minimum' pulse length count (out of 4096)
#define SERVOMAX 510 // this is the 'maximum' pulse length count (out of 4096)
uint8_t servomax = 14;
void setup() {
Serial.begin(9600);
Serial.println("16 channel Servo test!");
pwm.begin();
pwm.setPWMFreq(60); // Analog servos run at ~60 Hz updates
yield();
}
// you can use this function if you'd like to set the pulse length in seconds
// e.g. setServoPulse(0, 0.001) is a ~1 millisecond pulse width. its not precise!
void setServoPulse(uint8_t n, double pulse) {
double pulselength;
pulselength = 1000000; // 1,000,000 us per second
pulselength /= 60; // 60 Hz
Serial.print(pulselength); Serial.println(" us per period");
pulselength /= 4096; // 12 bits of resolution
Serial.print(pulselength); Serial.println(" us per bit");
pulse *= 1000;
pulse /= pulselength;
Serial.println(pulse);
pwm.setPWM(n, 0, pulse);
}
void loop() {
// Drive each servo one at a time
for (int servonum = 0; servonum < servomax; ++servonum) {
for (uint16_t pulselen = SERVOMIN; pulselen < SERVOMAX; pulselen+= 2) {
pwm.setPWM(servonum, 0, pulselen);
}
Serial.println("moved motor" + servonum);
delay(1);
}
delay(45000);
for (int servonum = 0; servonum < servomax; ++servonum) {
for (uint16_t pulselen = SERVOMAX; pulselen > SERVOMIN; pulselen-= 2) {
pwm.setPWM(servonum, 0, pulselen);
}
delay(1);
}
delay(500);
// servonum ++;
// if (servonum > 7) servonum = 0;
}
--
Previous: Proliferation Analyses | Next: Experimentation